Overview
The StockCar mobile robot is a fully autonomous vehicle. It is used in a Nascar circuit environment and races with other vehicles at the same time.
For a complete set of rules for the StockCar Competition, please visit the ACS Robotics Sig.
The 1998 competition was held on the 28 Nov 98, and this year we came SECOND. However our performance on the day was 110% better than last year. We now have a fully stable hardware base, with which we will clean up with next year.
See more pictures of the Hornet stockcar.
NOTE : This page might take a while to load.
Race Team
Design
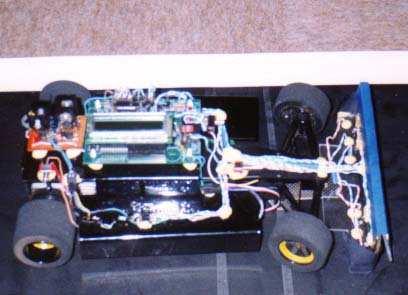
The design of the StockCar is simple yet effective. The two main ingredients for this robot are the controller board, and the robot chassis.
The controller board used is a HandyBoard. These boards are great for basic robotic uses.
The robot chassis for the StockCar was kindly donated by ?????, who through his generosity, we have been able to complete this project.
Several sensors were used to complete the design.
Integration
The integration of the robot chassis, controller board, and sensors was done by myself. Who in concert with Anthony and hours of effort has culminated the design into a working robot.
Sounds simple, but there was a huge amount of work involved.
Code
Of course to compliment robot hardware you need software. The code necessary to
navigate the track will not be posted here. The code from last year (1997) will
be posted on my Stockcar page shortly. Link on the left.
I'm hoping that this will help and encourage other entrants.
The code for this new robot is most definately secret!
| Last: 30Apr2000 |
|